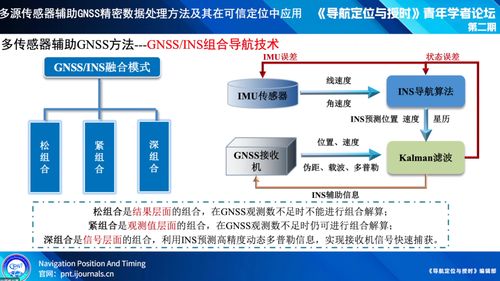
多源传感器辅助GNSS数据精密处理方法及其在可信定位中的应用 高周正副教授的研究探索
随着位置服务需求的日益精确与可靠,全球导航卫星系统(GNSS)虽已成为定位技术的核心,但在城市峡谷、室内外过渡区等复杂环境中,其信号易受遮挡、反射干扰,导致定位精度下降甚至失效。为解决这一挑战,高周正副教授及其研究团队致力于探索多源传感器辅助GNSS数据的精密处理方法,并将其应用于提升定位系统的可信度。这一研究方向不仅具有重要的学术价值,也为计算机软硬件及辅助设备零售行业带来了新的技术赋能机遇。
高周正副教授的研究聚焦于多源传感器融合技术。通过集成惯性测量单元(IMU)、视觉传感器、激光雷达(LiDAR)、里程计等辅助设备,团队开发了一套精密的GNSS数据处理算法。该方法能够在GNSS信号良好时,利用多源数据校准与优化定位结果;在信号受限或中断时,则依靠传感器数据实现高精度的自主导航与位置推算。关键技术包括:传感器时空同步校准、多源数据自适应滤波(如卡尔曼滤波及其变种)、以及基于机器学习的环境感知与误差补偿模型。这些方法显著提高了定位的连续性、精度与鲁棒性,为“可信定位”奠定了技术基础。
所谓“可信定位”,是指在复杂动态环境中,系统不仅提供高精度的位置信息,还能对定位结果的可靠性(如精度、完整性、可用性)进行实时评估与保障。高周正团队的研究正是围绕这一目标展开:通过多源传感器数据的交叉验证与一致性分析,系统能够实时检测并排除异常测量值,输出附带置信度评估的定位结果。这对于自动驾驶、无人机物流、应急救援等安全关键型应用至关重要。例如,在自动驾驶场景中,车辆结合GNSS、IMU和摄像头数据,即使在隧道中也能维持厘米级定位,并确保系统对定位状态有清晰的可信度认知,从而做出安全决策。
这项研究对计算机软硬件及辅助设备零售行业产生了直接而深远的影响。它推动了高精度传感器(如战术级IMU、多目视觉系统)与边缘计算设备的需求增长。零售商可以针对测绘、机器人、智能交通等领域,提供集成了多源传感器的定位解决方案包。精密处理算法往往需要强大的计算平台支持,这刺激了高性能嵌入式计算机、GPU加速卡及专用处理器的销售。随着可信定位技术在消费级设备(如智能手机、穿戴设备)中的渗透,零售市场也将迎来支持多源融合定位的新型智能硬件浪潮。
高周正副教授的研究不仅停留在实验室阶段,团队积极与产业界合作,推动技术成果转化。例如,开发适用于车载或机载平台的软硬件一体化定位模组,这些模组可直接作为产品,通过零售渠道提供给系统集成商或终端用户。相关的算法软件、开发工具包(SDK)及测试验证服务,也为软件零售与技术服务开辟了新市场。
随着5G通信、物联网(IoT)与人工智能的融合发展,多源传感器辅助的GNSS精密处理技术将更加智能化与普适化。高周正副教授的研究方向将持续引领可信定位技术的创新,并为计算机软硬件零售行业注入持续的技术动力,共同构建更加安全、可靠的高精度位置服务生态。
如若转载,请注明出处:http://www.zhishiv.com/product/64.html
更新时间:2026-06-19 22:02:54